Presentiamo, in questo articolo, il progetto “STARDUST” (Sistema di misura indossabile per trainings riabilitativi in patologie neurologiche e traumi), concluso nel 2023 e finanziato dal Ministero degli Affari Esteri e della Cooperazione Internazionale (MAECI). Il progetto è stato coordinato dallo Smart Structures and Systems Lab del Politecnico di Torino in collaborazione con l’istituto di neuropsicologia IDAC della Tohoku University in Giappone.
di Giorgio De Pasquale1, Ryuta Kawashima2, Elena Perotti3
1 Smart Structures and Systems Lab, Dip. di Ingegneria Meccanica e Aerospaziale, Politecnico di Torino.
2 Institute of Development, Aging and Cancer (IDAC), Tohoku University (Giappone).
3 Senior data analyst.
La progettazione meccanica o, estensivamente, “meccatronica” sta coinvolgendo negli ultimi anni discipline legate al monitoraggio del corpo umano, alla interazione dell’uomo con le macchine e alla misura di parametri biomeccanici. Queste soluzioni progettuali e costruttive stanno interessando diverse applicazioni di tipo industriale, come appunto gli ambiti di HMI (human-machine interface), e di tipo biomedicale. È interessante comprendere come la progettazione di questi dispositivi in grado di interagire con il corpo umano debba necessariamente coinvolgere competenze consolidate e già maturate in settori più radicati nel tempo.
Come noto, specifiche aree cerebrali gestiscono i movimenti corporei. Quando una determinata regione cerebrale viene danneggiata da patologie neurologiche legate all’invecchiamento oppure da eventi traumatici, possono verificarsi gravi limitazioni nel controllo dei movimenti, come del linguaggio o delle capacità visive e uditive. Dopo un ictus, ad esempio, i pazienti possono sperimentare una limitazione neurologica molto invasiva della mobilità e una paralisi parziale degli arti. Le procedure riabilitative tradizionali si basano su una pratica massiccia di esercizi motori supervisionati da terapisti. Tuttavia, la neuropsicologia sta indagando innovativi training riabilitativi multisensoriali assistiti da dispositivi/sensori indossabili, sfruttando la correlazione tra i movimenti e la cosiddetta “percezione del corpo” (body ownership). Questo meccanismo avviene, ad esempio, quando apprendiamo un movimento con una delle mani e siamo in grado poi di trasferire questa competenza automaticamente anche all’altra (apprendimento motorio). Questo stesso principio può essere applicato alle funzioni corporee bloccate dal trauma neurologico. Inoltre, è possibile eseguire i primi esercizi di apprendimento tramite un “avatar” del corpo virtuale, ad esempio attraverso un visore ottico, invece che sul corpo reale per ottenere lo stesso effetto di apprendimento a livello cerebrale.
Il numero di persone affette da patologie neurologiche e/o traumi sta aumentando progressivamente a causa dell’aumento dell’aspettativa di vita. Ad esempio, l’ictus è causato dalla perdita di apporto di sangue (ischemia) o da sanguinamento (emorragia) nel cervello. Rispetto ad altre malattie cardiovascolari, l’incidenza dell’ictus sta aumentando drasticamente nelle persone anziane. Le altre patologie neurologiche più frequenti sono le demenze neurodegenerative che causano invalidità delle capacità motorie (ad esempio, il controllo di parte o di tutto il corpo, chiamato “plegia”), disturbi del linguaggio, della memoria e della consapevolezza. Sintomi simili sono presenti nelle persone soggette a traumi associati a lesioni neurologiche come gli incidenti stradali. In questo caso, la conseguente deficienza neurologica colpisce fasce più giovani della popolazione.
L’incapacità di compiere anche semplici azioni quotidiane e di interagire con cose e persone ha un impatto enorme sulla salute psicologica dei pazienti. Oltre alle incapacità motorie, il disagio psicologico produce una propensione ai cambiamenti di umore e disturbi cognitivi. Questi disturbi penalizzano pesantemente il recupero del paziente e l’efficacia e la durata delle cure. Terapie altamente mirate, ancora in fase di studio, sono rivolte a questi pazienti. Le teorie più avanzate, supportate da campagne pilota su pazienti, si basano su allenamenti riabilitativi multisensoriali con dispositivi indossabili e/o realtà virtuale. Il paziente può sperimentare il movimento del corpo attraverso misurazioni dirette nelle parti in cui è inibito; il processo di recupero porta benefici in termini di efficacia e durata.
Nel progetto STARDUST, di cui parliamo in questo articolo, abbiamo progettato e realizzato un innovativo dispositivo indossabile nella forma di un guanto tecnologicamente avanzato. Questo dispositivo consente di verificare le caratteristiche del movimento riabilitativo e le progressioni del recupero del paziente. Le specifiche del guanto sono personalizzate e controllabili nel dettaglio. Il guanto è in grado di monitorare e analizzare il movimento degli arti superiori e di inviare i dati senza fili a un sistema di ricezione dati, connesso in rete. Questi dati possono essere utilizzati dal personale clinico e dagli psicologi per implementare l’analisi neurologica sul recupero del movimento. Tra gli altri, i parametri di interesse sono le grandezze cinematiche, le velocità e le accelerazioni (movimenti delle mani/arti), le forze statiche e dinamiche (muscoli delle mani), gli angoli di flessione (articolazioni delle dita).
Caratteristiche del dispositivo
Le specifiche tecniche del guanto STARDUST sono molto rigorose e includono un elevato grado di integrazione dei componenti (tessuti tecnici di supporto, sensori, componenti elettronici, strategie di comunicazione e di alimentazione) e buona indossabilità (bassa percezione del dispositivo durante i movimenti normali). Il prototipo di guanto fornirà ai neuropsicologi la possibilità di monitorare continuamente il progresso del paziente. Finora, gli esercizi riabilitativi sono stati svolti su postazioni fisse per intervalli di tempo limitati. Il monitoraggio prolungato nel tempo dei movimenti delle mani e delle braccia fornirà contributi aggiuntivi agli studi dell’esperienza cosciente del corpo umano. Il dispositivo ha il potenziale per rivelare la variabilità della proprietà del corpo e della coscienza del movimento durante le attività quotidiane, rivelando quali situazioni siano funzionali agli obiettivi di recupero e quali siano dannose per la riabilitazione.
Le specifiche del progetto: dalla neuropsicologia all’ingegneria
Gli studiosi di neuropsicologia si occupano di studiare le basi anatomico-funzionali delle funzioni cognitive umane e quindi aspetti come la consapevolezza spaziale, la consapevolezza motoria e la consapevolezza corporea. Gli allenamenti prevedono esercizi giornalieri per l’arto superiore, come ad esempio esercizi di velocità, di precisione e di forza. Per la riabilitazione neuro-motoria, sono stati individuati i seguenti training significativi:
- Pinching: consiste nel toccare la punta del pollice con la punta delle altre quattro dita con una particolare sequenza predefinita.
- Grasping: afferrare un oggetto e rilasciarlo.
- Wrist training: allenamento per il polso, cioè l’esecuzione di rotazioni, flessioni e estensioni per migliorare le articolazioni inter-carpali.
- Reaching: afferrare un oggetto nel minor tempo possibile.
- Following: dopo un segnale acustico che indica l’inizio dell’esercizio, il paziente deve seguire con un dito un punto luminoso su uno schermo, nel modo più preciso possibile.
Come detto, ogni training consiste nel monitorare opportuni parametri, motivo per il quale è stato necessario definire innanzitutto le grandezze fisiche da misurare a partire dalle quali si riescono ad ottenere i parametri desiderati; definite le grandezze fisiche il passo successivo è stato quello di stabilire quali sensori potessero fornire le misure necessarie, come riportato in Tab. 1.
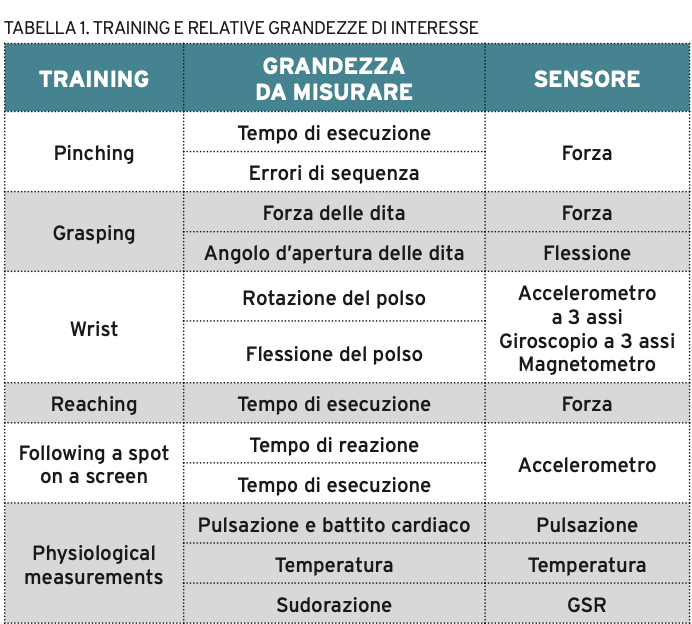
Il guanto STARDUST è stato sviluppato per supportare, fra quelli elencati, i training di Pinching, Grasping e Reching. Per l’esercizio di Pinching serve impiegare sensori di forza sulle dita per la misura del profilo temporale di attuazione muscolare e per la correttezza della sequenza da eseguire. Per tempo di esecuzione si intende l’intervallo di tempo che intercorre tra il segnale acustico (emesso da un’opportuna interfaccia software) e il contatto tra la punta del pollice con quella di un altro dito. Il Grasping fa uso dei sensori di forza per determinare la forza e la pressione esercitata dalle dita nell’afferrare un oggetto, mentre l’angolo delle articolazioni viene determinato mediante altri sensori, in grado di misurare la flessione del dito. Per l’esercizio di Reaching saranno utilizzati gli stessi sensori di forza citati prima.
Progettazione dei componenti e integrazione
Tipologia di sensori
Come accennato, la scelta dei sensori è strettamente connessa al tipo di grandezza che si intende misurare. La scelta non è univoca, ma esistono diverse alternative in letteratura. Anche il numero e la posizione dei sensori sul guanto è importante ai fini della misura. Partiamo dai sensori di flessione necessari per misurare la posizione angolare di ciascun dito. I sensori di flessione comunemente impiegati possono essere distinti in quattro categorie:
- Piezoelettrici. Si tratta di film con proprietà piezoresistive ricoperti da strati protettivi polimerici; funzionano bene in dinamica, meno accuratamente per flessioni statiche, non richiedono energia di alimentazione (passivi) ed esistono molte varianti di forma e dimensioni.
- Sensori a fibra ottica. Hanno peso ridotto, bassa sensibilità alle interferenze elettromagnetiche, buona flessibilità, sensibilità e affidabilità. Si tratta di guide d’onda planari (2D) che vengono disposte sulle dita, ad una estremità si trova la sorgente luminosa (LED), mentre dall’altra un fotodiodo. Quando la fibra si piega, al foto-rivelatore giunge minore intensità luminosa, convertita in angolo di flessione.
- Resistivi. Sono caratterizzati da un supporto in carbonio il cui valore di resistenza varia in base all’angolo di flessione. Il grande vantaggio nell’impiego di questo tipo di sensori è il costo, notevolmente inferiore rispetto ai precedenti due. Se ne trovano di lunghezza variabile.
- Sensori ad effetto Hall. La tensione di uscita cambia al variare del campo magnetico applicato. Questo effetto è comunemente usato anche in sensori di velocità, prossimità, posizione e corrente.
Nel guanto Stardust sono stati previsti sensori di tipo resistivo, in particolare quelli rappresentati in Fig. 1a in poliestere laminato prodotti da Flexpoint.

L’altra grandezza di interesse è la forza esercitata dalle dita in corrispondenza del polpastrello, sia nell’atto di afferrare un oggetto sia nel momento del contatto con un altro dito. In questo caso i sensori solitamente usati sono i seguenti:
- FSR (Force Sensing Resistor): basati su film di materiale polimerico sui quali è stampato un layer di inchiostro con particelle metalliche; questi materiali subiscono una riduzione della resistenza elettrica in risposta a forze applicate crescenti.
- Piezoelettrici: si tratta di sensori che rilevano una variazione di pressione in base alla differenza di potenziale che si genera al loro interno; si basano su materiali come tessuti elastici costituiti da fibre sintetiche di supporto come il nylon e da fibre attive per la restante parte.
- Capacitivi: basati su materiali che modificano la loro capacità elettrica a fronte di forze applicate, generalmente nel range compreso fra 4 e 25 kg.
- Elettromiografi (sensori EMG): in genere impiegati per la misura dei segnali elettrici che scaturiscono dalla contrazione di alcuni muscoli, per esempio quelli dell’avambraccio, per stimare la forza applicata dalle dita.
- Sensori MARG (Magnetic Angular Rate Gravity): è un sistema di sensori che determina un modello cinematico dei movimenti della mano combinando sensori magnetici, di velocità angolare e di gravità.
Nel guanto Stardust si è scelto di introdurre i sensori FSR, del tipo rappresentato in Fig. 1b prodotto da Tekscan.
Il prototipo è basato su una affidabile interfaccia elettro-meccanica fra il supporto tessile, l’alloggiamento dell’elettronica e i sensori integrati nel guanto. Mediante appositi strumenti di misura (multimetro digitale e oscilloscopio) sono state misurate le caratteristiche elettriche ai capi dei connettori di ciascun sensore per identificare i cavi corrispondenti a ogni trasduttore elettro-meccanico e per verificare il range di misura e la stabilità del segnale in uscita a fronte di sollecitazioni indotte sul singolo sensore. In altre parole, si è eseguita una attività di caratterizzazione e calibrazione dei singoli sensori.
Il passaggio successivo è stato il cablaggio di ogni cavo di output dei singoli sensori con connettori idonei, scelti con alcuni criteri di progettazione specifici, quali in particolare:
- reversibilità, ovvero la possibilità di connettere e disconnettere il singolo cavo dall’alloggiamento in caso di necessità (per esempio per operazioni di lavaggio o di sostituzione di componenti);
- ridotte dimensioni, in grado di consentire l’alloggiamento di otto connettori e sedici cavi complessivi in uno spazio molto ristretto corrispondente a quello dell’alloggiamento in polimero montato sul dorso del guanto;
- facilità di montaggio mediante un supporto appositamente progettato e costruito con processo di manifattura additiva in polimero.
Gestione dei segnali misurati
Una volta scelte le grandezze di interesse e i relativi sensori utili alla misura, nonché la loro posizione sul guanto, è necessario progettare e realizzare i circuiti di condizionamento che convertono la grandezza di interesse in corrispondente valore di tensione, in modo tale da poterlo leggere, processare e memorizzare.
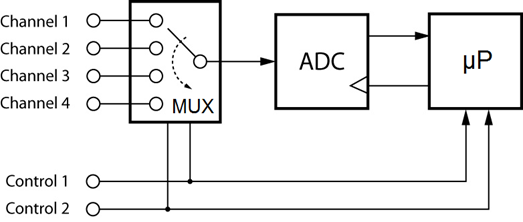
Chiaramente, essendoci più sensori, bisognerà adottare delle strategie tali da poterli acquisire tutti. Il modo in cui viene fatto dipende da tanti fattori, ad esempio il numero di canali di cui dispone l’ADC (analog-to-digital converter) utilizzato. Un altro metodo spesso impiegato è quello di inserire tra i sensori e il convertitore un multiplexer (Fig. 2). In tal caso, pilotando opportunamente il multiplexer tramite il microcontrollore (indicato con “µP”), sarà possibile selezionare di volta in volta il canale da acquisire, ovvero il sensore che sarà direttamente collegato all’ADC e che pertanto verrà campionato.
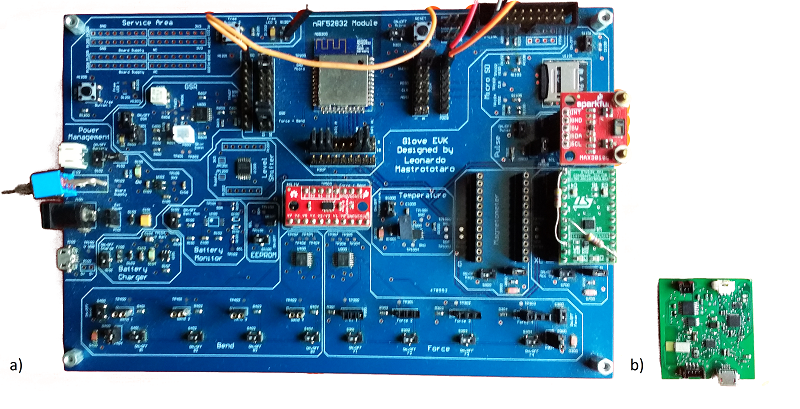
Il circuito elettronico di gestione dei segnali, di ricarica della batteria e di controllo della comunicazione wireless è stato progettato e sviluppato inizialmente su scheda di prova, e poi miniaturizzata (dimensioni finali di 30×30 mm) per il montaggio sul guanto. In Fig. 3 si vedono le due schede a confronto.
Integrazione del sistema
Come risultato finale, il sistema integrato è composto dal supporto tessile a doppio strato con sensori interni e alloggiamento in materiale polimerico montato sul dorso (Fig. 4). Quest’ultimo è composto dalla parte inferiore, di colore bianco, che ospita i connettori con i cablaggi provenienti dagli otto sensori installati sulle dita 2-5, e la parte superiore, di colore blu, che alloggia la scheda elettronica e i pulsanti di attivazione. Il guanto è progettato per essere lavabile, pertanto la possibilità di rimuovere la parte superiore dell’alloggiamento consente di preservare le parti elettroniche più delicate nelle operazioni di pulitura.
Interfaccia software
Insieme al dispositivo di misura è stato sviluppato il firmware per la gestione dei segnali e delle altre funzioni (ricarica della batteria e comunicazione wireless) e una interfaccia grafica che consente all’utente l’utilizzo del dispositivo (Fig. 5). Questo programma include anche una interfaccia grafica per l’utente che consente di gestire le comunicazioni, settare i parametri della comunicazione stessa e attivare il sub-set di sensori desiderato, in base al tipo di training riabilitativo in esecuzione. Allo stesso modo, il firmware per la gestione dei comandi e controlli del sistema è stato sviluppato e validato all’interno del progetto. La comunicazione fra guanto e PC è realizzata mediante un dispositivo hardware aggiuntivo, ovvero un ricevitore con porta USB che viene inserito nel PC stesso e svolge la funzione di ponte di trasmissione con il guanto.
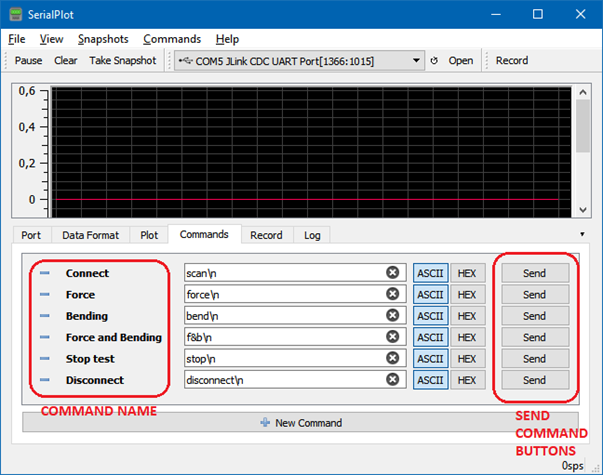
Sono stati identificati i training più significativi per i pazienti destinatari di questo dispositivo. Ogni training coinvolge alcuni movimenti specifici, i quali sono associati ad altrettanti sensori che vengono attivati sul guanto, secondo questa suddivisione:
- Force: vengono attivati soltanto i quattro sensori di forza;
- Bending: vengono attivati solo i quattro sensori di flessione;
- Force and bending: vengono attivate entrambe le tipologie di sensori;
- Stop test: ferma il training corrente;
- Disconnect: disconnette il guanto dal PC.

Collaudo funzionale
Dopo il completamento del prototipo si procede al collaudo funzionale del sistema di misura, applicato ad alcuni dei training di riabilitazione previsti in fase di progetto. Vediamone alcuni di seguito.
Presa di un oggetto cilindrico
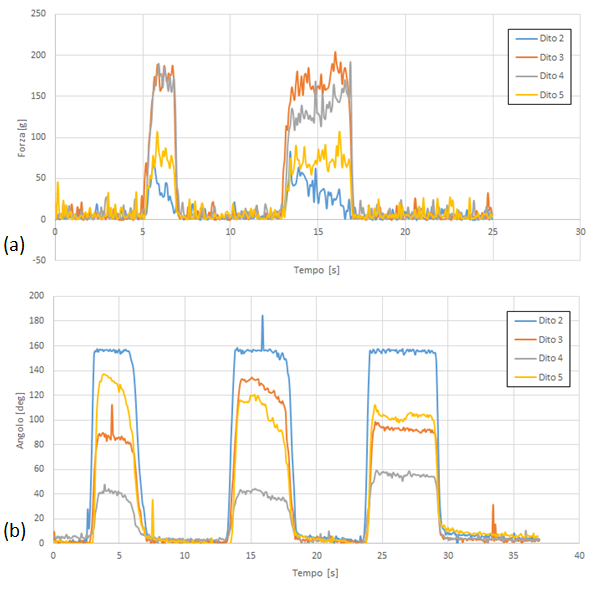
Il seguente test consiste nella misura dei parametri biomeccanici della mano durante l’operazione di presa di un oggetto cilindrico, qui rappresentato da una bomboletta spray (Fig. 6a). Il test riproduce il training riabilitativo inerente il recupero delle attività motorie e muscolari associate alla operazione di presa. Il paziente viene sottoposto a rilievo periodico nel tempo per misurare la capacità di replica del movimento e la intensità della forza applicata all’oggetto afferrato. Per questo test sono attivati i sensori di forza e i sensori di flessione delle dita 2-5 (tutti i sensori disponibili).
Il test avviene secondo queste fasi: 1) l’operatore avvicina la mano all’oggetto cilindrico, 2) si esegue la presa in modo naturale accostando le dita all’oggetto, 3) si applica una forza necessaria ad afferrare l’oggetto e sollevarlo, 4) si rilascia l’oggetto in modo naturale.
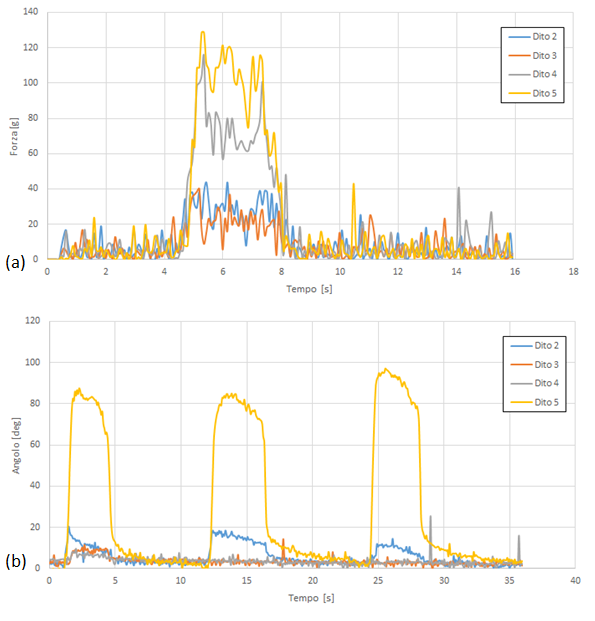
I risultati del test sotto forma di misura di forza rilevata sui polpastrelli e di angolo di flessione delle dita 2-5 sono rappresentati dai grafici di Fig. 7.
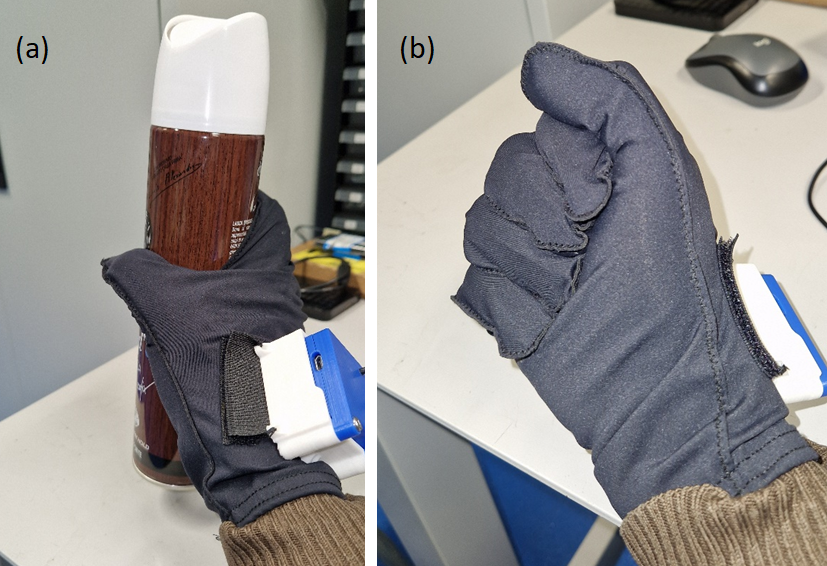
Chiusura del pugno
Il seguente test consiste nella misura dei parametri biomeccanici della mano durante l’operazione di chiusura a pugno (Fig. 6b). Il test riproduce il training riabilitativo inerente il recupero delle attività motorie e muscolari associate alla operazione di mobilità della mano. Il paziente viene sottoposto a rilievo periodico nel tempo per misurare la capacità di replica del movimento. Per questo test sono attivati i sensori di forza e di flessione delle dita 2-5.
Il test avviene secondo queste fasi: 1) l’operatore accosta le dita della mano, 2) si esegue il serraggio del pugno, 3) si rilasciano le dita e si riportano in configurazione di riposo.
I risultati del test sotto forma di misura di forza rilevata sui polpastrelli e di angolo di flessione delle dita 2-5 sono rappresentati dai grafici di Fig. 8.