

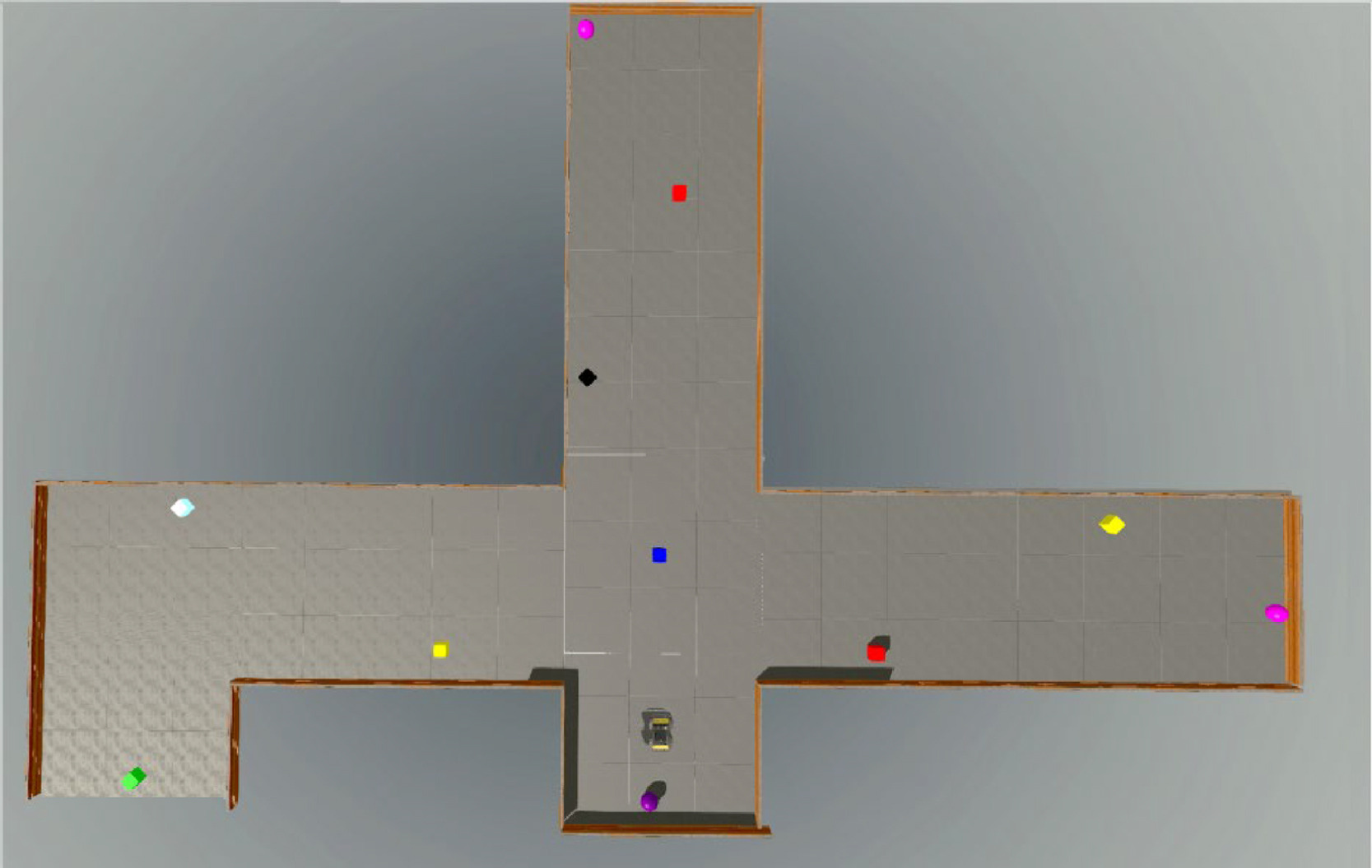
Studiando il modello computazionale dell’ippocampo umano, ricercatori del Cnr-Ibf hanno sviluppato un sistema robotico capace di capire come muoversi in un ambiente, analogamente a come farebbe un essere umano. La ricerca è pubblicata su Neural Networks.
I ricercatori dell’Istituto di biofisica del Consiglio nazionale delle ricerche (Cnr-Ibf) di Palermo applicando le ricerche condotte sulla simulazione dell’ippocampo umano, hanno sviluppato un sistema robotico in grado di apprendere come muoversi in un ambiente, similmente a come farebbe un essere umano. I risultati dello studio sono stati pubblicati su Neural Networks.
Il sistema robotico che auto-organizza le proprie connessioni sinaptiche
“La rete neuronale implementata supera il modello del ‘deep learning’. Un robot equipaggiato con questa rete, creata dal team del Cnr-Ibf, è in grado di auto-organizzare le proprie connessioni sinaptiche mentre si muove, ed è capace di imparare a raggiungere una destinazione specifica con una sola sessione di apprendimento, ricordando il percorso nelle sessioni successive”, spiega Michele Migliore del Cnr-Ibf.
Ispirandosi alla biologia, i ricercatori sono stati in grado di dimostrare l’efficienza delle modalità di apprendimento proprie dei mammiferi rispetto a quelle utilizzate dalle piattaforme basate sul deep learning. “Abbiamo costruito la rete utilizzando gli elementi costitutivi fondamentali e le caratteristiche note dei neuroni e delle sinapsi dell’ippocampo”, continua il ricercatore.
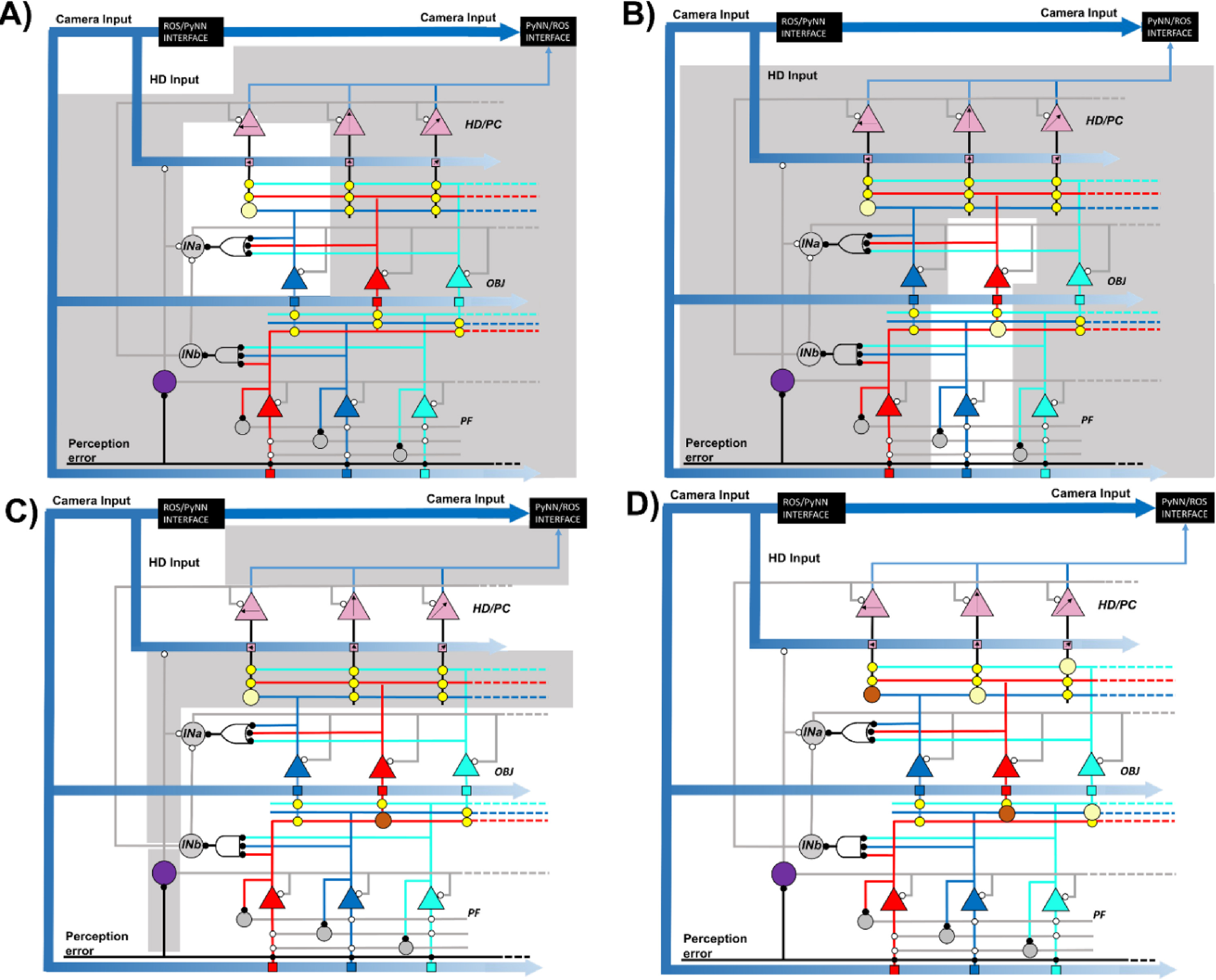
“Questa è la prima volta che siamo in grado di realizzare la formazione di una funzione cognitiva di alto livello a partire dalla micro-architettura di una regione cerebrale, ovvero i singoli neuroni e le loro connessioni. I risultati spiegano anche come mai le reti di intelligenza artificiale attuali non potranno mai competere con l’efficienza e la velocità di apprendimento dei circuiti biologici, a meno di non utilizzare le stesse architetture già sviluppate dall’evoluzione naturale”.
Cambiamento importante rispetto agli attuali metodi di navigazione autonomi
La ricerca apre la strada a un cambiamento importante rispetto agli attuali metodi di navigazione autonomi, lasciando intravvedere diverse ricadute pratiche, per esempio nell’ambito dell’automazione industriale e della logistica, con la riduzione di errori di produzione e di performance meccanica; un altro settore che potrebbe beneficiare dallo sviluppo di queste architetture IA sono i sistemi di guida assistita e di ausilio per le persone con ridotte capacità fisiche.
L’iniziativa si inserisce nel programma di ricerca del progetto bandiera europeo (European flag project) Human Brain Project – di cui il Cnr è partner – ed è stato sviluppato nell’ambito dell’infrastruttura di ricerca “EBRAINS-Italy”, finanziata da Next Generation EU e dal Ministero della Ricerca nell’ambito dei fondi PNRR M4C2, di cui Michele Migliore è responsabile scientifico.
Coppolino and Migliore, (2023), “An explainable artificial intelligence approach to spatial navigation based on hippocampal circuitry”, Neural Networks, https://doi.org/10.1016/j.neunet.2023.03.030



