

Il giroscopio è un dispositivo che permette di mantenere l’equilibrio e orientarsi nello spazio, sfruttando la rotazione. Da strumenti meccanici a sensori miniaturizzati nei nostri smartphone, questa tecnologia ha rivoluzionato la navigazione, l’aerospazio e molto altro.
di Giorgio de Pasquale ed Elena Perotti

Il giroscopio è un dispositivo meccanico che sfrutta il principio della conservazione del momento angolare per rilevare e mantenere l’orientamento di un corpo rispetto a un sistema di riferimento. Il giroscopio è costituito principalmente da un rotore che ruota ad alta velocità attorno a un asse, il quale è montato su uno o più giunti cardanici (formando un supporto pivottante detto “gimbal”). Questi giunti permettono al rotore di mantenere il suo asse di rotazione costante, indipendentemente dai movimenti del supporto. Infatti la caratteristica fondamentale di un giroscopio è che, grazie alla conservazione del momento angolare, il piano di rotazione del rotore rimane appunto invariato, almeno fino a quando non viene applicato un momento esterno.
Le recenti evoluzioni dell’elettronica, dei metodi di calcolo, della fotonica e dei sistemi produttivi hanno notevolmente influenzato lo sfruttamento industriale del giroscopio. Anche se il concetto di giroscopio descritto resta invariato, la tecnologia che ne supporta lo sviluppo e l’utilizzo si è evoluta significativamente negli ultimi decenni. Le tendenze seguite riguardano lo sviluppo di nuove tecnologie in grado di offrire maggiori precisioni, dimensioni ridotte, minore peso e costi contenuti. Questi requisiti si sono applicati a numerose aree produttive, commerciali, industriali e recentemente anche in ambito di raccolta e analisi di dati. Le capacità di rilevamento sono in continuo sviluppo, consentendo misurazioni di parametri ad alta risoluzione e a livelli precedentemente impensabili. Queste attività richiedono sistemi di misura precisi, fra i quali rientrano i sensori inerziali e, quindi i giroscopi.
Oltre che in applicazioni di metrologia industriale tipiche, questi dispositivi trovano ampio utilizzo in sistemi di navigazione inerziale legati ad esempio all’esplorazione spaziale e sottomarina, ai satelliti, alla robotica, alla miniaturizzazione e ai veicoli senza equipaggio. È piuttosto sicuro affermare che tutti i sistemi menzionati richiedono in qualche modo dispositivi o sensori giroscopici.
Le origini del Giroscopio
Il giroscopio fu inventato per la prima volta nel 1817 dal fisico tedesco Johann Bohnenberger, che lo chiamò semplicemente “macchina”. Si trattava di un dispositivo semplice composto da un disco rotante sospeso su un giunto cardanico. Bohnenberger utilizzò la sua invenzione per dimostrare la rotazione della Terra.
Nel 1852, il fisico francese Jean-Bernard-Léon Foucault sviluppò una nuova versione del giroscopio, che chiamò “giroscopio di Foucault”. Questo modello era più preciso rispetto a quello di Bohnenberger e fu impiegato per effettuare le prime misurazioni accurate della rotazione terrestre.
Verso la fine del XIX secolo, i giroscopi iniziarono a trovare applicazioni pratiche in ambiti come la navigazione, la stabilizzazione e la guida. Nel 1885, l’inventore tedesco Hermann Anschütz-Kaempfe realizzò il primo giroscopio pratico per bussole giroscopiche, utilizzate su navi e aeroplani per mantenerne la rotta.
I giroscopi trovarono anche applicazione nei primi velivoli e veicoli spaziali per stabilizzarne e controllarne l’orientamento. Nel 1910, l’inventore americano Elmer Sperry progettò il primo giroscopio per aeromobili, utilizzato per stabilizzare gli aerei durante il volo.
Funzionamento e componenti del giroscopio
La struttura di base di un giroscopio è costituita da un grande rotore montato su anelli di supporto leggeri chiamati “cardani”. Grazie ai cuscinetti privi di attrito presenti nei cardani, il rotore centrale è protetto da coppie esterne. L’asse del rotore, ovvero la ruota rotante, definisce l’asse di rotazione. Quando il rotore ruota attorno a un asse, esso possiede tre gradi di libertà rotazionali. Dopo aver raggiunto una velocità elevata, il rotore acquisisce un equilibrio estremamente stabile, mantenendo così costante l’asse di rotazione ad alta velocità del suo nucleo.
Gli elementi principali di un giroscopio
Un giroscopio è composto dai seguenti elementi principali:
- Asse di rotazione. È l’asse attorno al quale ruota il disco o la ruota del giroscopio. Questo asse è determinato dall’albero del rotore (la ruota rotante) e si mantiene perpendicolare all’asse del cardano interno, attorno al quale il rotore deve ruotare continuamente.
- Cardano. Il cardano è un supporto che consente la rotazione di un oggetto attorno a un asse. Un oggetto montato sul cardano più interno di un sistema a tre cardani può mantenere la sua indipendenza dalla rotazione del supporto, grazie al montaggio sul cardano più esterno, con assi di rotazione ortogonali tra loro.
- Rotore. Il rotore, il cuore del giroscopio, è protetto da coppie esterne grazie all’uso di cuscinetti privi di attrito presenti nei cardani. L’albero del rotore determina l’asse di rotazione. Grazie alla sua capacità di mantenere l’asse di rotazione ad alta velocità vicino al centro, il rotore garantisce un’eccellente stabilità. Il rotore presenta tre gradi di libertà rotazionali.
- Telaio del giroscopio. Il cardano più esterno, indicato come telaio del giroscopio nei dispositivi con due cardani, è posizionato in modo da poter ruotare attorno a un asse situato nel suo piano, determinato dal supporto che lo contiene.
Il giroscopio come sensore
Quando un giroscopio viene utilizzato come sensore, la sua capacità di rilevare variazioni angolari lo rende utile per determinare orientamenti e movimenti rotatori. In un sensore giroscopico, l’elemento rotante del giroscopio è in grado di misurare le variazioni angolari rispetto a un asse di riferimento. La rotazione del giroscopio genera una variazione nel momento angolare, che può essere tradotto in una misura della posizione angolare stessa. Questa variazione viene quindi convertita in un segnale elettrico tramite un opportuno sistema di rilevamento (come un accelerometro integrato o un sistema di rilevamento ottico), permettendo così al sensore di misurare l’inclinazione, la velocità angolare e l’orientamento dell’oggetto su cui è montato.
Un sensore giroscopico ha la capacità di rilevare variazioni angolari e di misurare la velocità angolare in tempo reale. La sua precisione dipende dalla qualità del rotore e dai giunti meccanici, ma i giroscopi moderni spesso utilizzano tecnologie come MEMS (micro electro-mechanical systems), che permettono di ridurre le dimensioni del sensore mantenendo alta l’accuratezza. Le proprietà principali di un sensore giroscopico includono la capacità di operare in un ampio intervallo di temperature, la risposta rapida alle variazioni angolari e una certa stabilità a lungo termine, che lo rendono ideale per applicazioni in ambito aerospaziale, automobilistico e nei dispositivi portatili. Inoltre, i giroscopi sono sensibili alla velocità angolare piuttosto che alla posizione assoluta, proprietà che li rende particolarmente utili per il rilevamento di rotazioni rapide e per applicazioni che richiedono misurazioni di orientamento dinamico.
Giroscopi MEMS
I MEMS sono una tecnologia produttiva che ha avuto origine dall’industria dei circuiti integrati negli anni ’60 e che consente di combinare elementi elettrici e meccanici in dimensioni micrometriche simili a quelle dei chip. La tecnologia più comune dei giroscopi MEMS sfrutta l’effetto Coriolis.
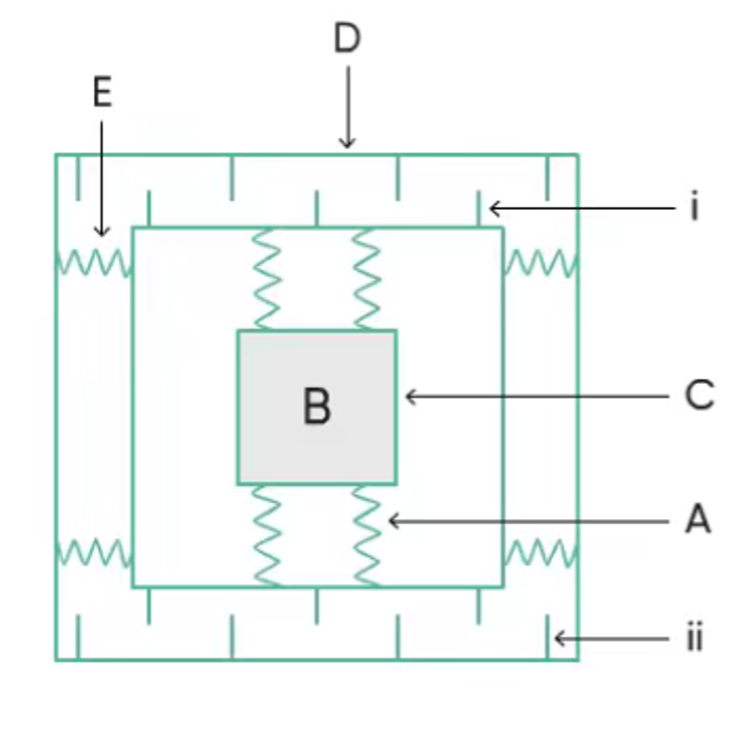
In un tipico giroscopio MEMS basato sull’effetto Coriolis, una massa sospesa con apposite molle elastiche su un telaio viene posta in oscillazione alla sua frequenza di risonanza lungo l’asse di eccitazione. Questo telaio è situato all’interno di un secondo telaio, con altre molle, disposte a 90° rispetto all’asse di oscillazione della massa, in modo da rendere le due strutture isolate dinamicamente. Il secondo telaio si muove lungo l’asse di rilevamento del giroscopio. Quando il giroscopio viene ruotato, l’effetto Coriolis induce una vibrazione secondaria lungo l’asse di rilevamento (perpendicolare all’asse di eccitazione), che tende a spostare la massa oscillante e il telaio interno in direzione opposta alla rotazione applicata. Questo contro-movimento viene rilevato mediante una misura capacitiva su appositi condensatori ad armature mobili, proporzionale alla forza di Coriolis e quindi alla rotazione imposta. Il funzionamento è descritto in Fig. 2.
Giroscopi a fibra ottica
Il giroscopio a fibra ottica (FOG) è una tecnologia basata sulla fotonica e sul laser, dimostrata per la prima volta a metà degli anni ’70. I FOG sono noti per la loro elevata precisione e resistenza alla deriva, caratteristiche che li rendono adatti a applicazioni di alto livello in ambito tattico e di navigazione inerziale. Un tipico INS (Sistema di Navigazione Inerziale) basato su FOG ha tre bobine di fibra ottica per gli assi X, Y e Z, posizionate ortogonalmente (a 90°) tra loro, un emettitore laser o una sorgente luminosa a banda stretta e un ricevitore ottico.
Il principio di funzionamento consiste in un fascio luminoso emesso dal laser che colpisce uno specchio semi-riflettente, il quale genera due raggi. I due fasci di luce entrano quindi in una bobina di fibra ottica a ciascuna estremità viaggiando al suo interno simultaneamente in direzioni opposte. Uscendo dalla bobina, i fasci di luce entrano nel ricevitore ottico, che li ricombina. In questa operazione le forme d’onda dei due fasci collidono tra loro e generano il fenomeno dell’interferenza ottica.
Se il FOG non è in rotazione, i fasci di luce raggiungono il ricevitore ottico esattamente nello stesso istante, poiché la luce percorre la stessa distanza e alla stessa velocità. Se invece si verifica una rotazione, il tempo effettivo richiesto alla luce per percorrere la bobina in una direzione sarà diverso rispetto all’altra direzione, causando uno spostamento di fase tra le due forme d’onda dei fasci di luce. Questo fenomeno ottico è chiamato effetto Sagnac. Questo sfasamento sarà evidente nella forma d’onda combinata. Un giroscopio a fibra ottica utilizza quindi lo sfasamento tra le due forme d’onda dei fasci di luce per calcolare la rotazione con un elevato grado di precisione.
Giroscopi laser ad anello

Il giroscopio laser ad anello (RLG) è stato dimostrato all’inizio degli anni ’60 e può essere considerato il precursore del FOG. La principale differenza rispetto al FOG è che nel RLG la luce viene propagata in una cavità risonante. Un RLG tipico utilizza due fasci laser inviati in direzioni opposte lungo un percorso definito da specchi. La luce laser riflette da uno specchio all’altro, creando l’”anello”, fino a raggiungere il ricevitore ottico. Il giroscopio laser ad anello misura la differenza di frequenza tra le due forme d’onda della luce per definire la velocità angolare.
Si può affermare che il FOG sia superiore all’RLG, principalmente a causa del percorso di luce più lungo che gli consente di fornire una risoluzione di misurazione più elevata. Tuttavia, l’RLG è in produzione e in uso da decenni, rendendolo una tecnologia di giroscopio consolidata in vari settori, come la produzione di velivoli commerciali.
Giroscopi in piattaforme inerziali
Se gli accelerometri fossero fissati direttamente alle strutture da monitorare, per esempio alla fusoliera di un velivolo, i loro output sarebbero influenzati dall’assetto e dall’orientazione del velivolo stesso. Questa considerazione nasce dal fatto che l’accelerazione causata dalla gravità non può essere separata da quella dovuta a una variazione della velocità del corpo. L’accelerometro rileva sempre la combinazione vettoriale di entrambe le accelerazioni, ma per i calcoli necessari al monitoraggio, è fondamentale considerare solamente l’accelerazione associata ai cambiamenti di velocità del sistema oggetto di indagine.

Per evitare che l’accelerometro confonda una componente della forza gravitazionale con l’accelerazione di gravità, è necessario mantenere costante l’orientamento orizzontale dell’accelerometro. A tal fine, questi sensori vengono installati sopra un supporto cardanico, noto anche come piattaforma inerziale. Questo sistema consiste in una serie di dispositivi che consentono alla struttura (nell’esempio, al velivolo) di muoversi liberamente nello spazio, sia longitudinalmente che lateralmente, mentre gli accelerometri rimangono in posizione orizzontale, come illustrato nella Fig. 4.
Per mantenere stabile la piattaforma, vengono impiegati giroscopi che generano segnali utilizzati per attivare alcuni servomotori. Questi motori controllano gli snodi cardanici, garantendo che la piattaforma rimanga in posizione orizzontale. La Fig. 5 illustra il processo attraverso cui i giroscopi contribuiscono alla stabilizzazione della piattaforma.
I giroscopi e gli accelerometri sono montati sullo stesso supporto. Quando questa superficie devia dalla posizione orizzontale, l’asse di rotazione del giroscopio rimane fisso nello spazio, mentre il contenitore del giroscopio si muove con la piattaforma. Il movimento viene rilevato da un sensore che invia un segnale elettrico, il quale viene amplificato e inviato al servomotore adeguato, in modo da ruotare gli snodi della sospensione cardanica e ripristinare la posizione orizzontale della piattaforma. Questo sistema viene replicato su tutti e tre gli assi di rotazione. In questo modo, poiché gli accelerometri sono mantenuti su una superficie parallela all’orizzonte, non sono influenzati dalla gravità, permettendo loro di misurare esclusivamente le accelerazioni reali della struttura.

Principi fondamentali della fisica del giroscopio
Per analizzare i fenomeni fisici principali alla base di un giroscopio, necessari anche alla sua progettazione iniziamo a citare la “precessione” e il “momento angolare”.
La precessione è utilizzata per valutare l’orientamento di un giroscopio quando è soggetto a forze esterne o rotazioni attorno a un asse specifico. La precessione si verifica quando un oggetto in rotazione attorno a un asse subisce una coppia esterna perpendicolare all’asse di rotazione. Una coppia applicata in direzione opposta, utilizzando un motore o un altro meccanismo, può annullare la precessione e mantenere l’orientamento. Due giroscopi posizionati perpendicolarmente l’uno all’altro possono prevenire il fenomeno della precessione. Il pulsare di una coppia opposta a intervalli regolari può essere utilizzato per calcolare la velocità di rotazione.
Il momento angolare è una grandezza fisica che può essere definita matematicamente come il prodotto tra il momento di inerzia e la velocità angolare del corpo che ruota. È una grandezza vettoriale, quindi anche la direzione del momento angolare deve essere presa in considerazione. Poiché il momento angolare è una grandezza vettoriale, ha sempre una direzione che deve essere indicata insieme alla sua magnitudine. Per determinare la direzione del momento angolare, si utilizza la “regola della mano destra”. La regola della mano destra può essere spiegata come segue: se le dita della mano destra si curvano nella direzione della rotazione, il pollice disteso indica la direzione del momento angolare e della velocità angolare (Fig. 6).
Il momento angolare viene utilizzato in numerose applicazioni, tra cui la dinamica del moto di motocicli e biciclette, i controlli di stabilità del volo negli aeromobili, il rilevamento della gravità in dispositivi elettronici.

La conservazione del momento angolare
La conservazione del momento angolare è un principio fondamentale della fisica che afferma che, in assenza di forze esterne, il momento angolare di un sistema rimane costante nel tempo. Questo concetto è applicabile a sistemi sia puntiformi che estesi, ed è un principio centrale nel funzionamento dei giroscopi.
Questo concetto viene utilizzato in molte applicazioni nella vita reale: i pattinatori su ghiaccio possono aumentare la loro velocità di rotazione avvicinando le mani e le gambe, e per rallentare, allungare gli arti. Ovviamente anche il giroscopio utilizza il principio del momento angolare per orientarsi.
Il momento angolare di un corpo in rotazione attorno a un asse è definito come il prodotto vettoriale tra il vettore posizione del punto di massa rispetto all’asse di rotazione e il vettore quantità di moto , ovvero:

dove:
- è il vettore posizione,
- è la quantità di moto, con la massa del corpo e la sua velocità.
Nel caso di un corpo rigido che ruota attorno a un asse fisso, il momento angolare si esprime come il prodotto tra il momento di inerzia del corpo e la sua velocità angolare:

dove:
- è il momento di inerzia, che dipende dalla distribuzione della massa del corpo rispetto all’asse di rotazione,
- è la velocità angolare, che indica la velocità con cui il corpo ruota attorno all’asse.
Secondo il principio della conservazione del momento angolare, se non ci sono forze esterne che agiscono sul sistema, il momento angolare rimane costante nel tempo:

Da questa relazione segue che se è costante, la velocità angolare deve rimanere invariata. Se, invece, il momento di inerzia cambia, la velocità angolare si adatterà per mantenere costante il momento angolare complessivo del sistema.
Applicazione al Giroscopio
Nel caso di un giroscopio, il principio della conservazione del momento angolare si manifesta nella sua capacità di mantenere stabile l’orientamento del suo asse di rotazione. Quando un giroscopio è in movimento, la sua velocità angolare e il suo momento di inerzia determinano il momento angolare complessivo del sistema. Se non vengono applicate forze esterne, il momento angolare del giroscopio non cambia, e quindi l’orientamento dell’asse di rotazione rimane invariato.
Per esempio, se si tenta di inclinare un giroscopio mentre sta ruotando, il cambiamento nell’orientamento dell’asse di rotazione non avviene immediatamente, ma è influenzato dalla resistenza alla variazione angolare, che è una manifestazione del momento angolare conservato. Questo effetto, come abbiamo detto, è noto come precessione. Se un momento esterno tenta di modificare l’orientamento del giroscopio, invece di cambiare direttamente l’asse di rotazione, il giroscopio risponderà spostando l’asse di rotazione in una direzione perpendicolare alla direzione del momento applicato.
Matematicamente, questo effetto può essere descritto dalla seguente relazione che lega il momento esterno applicato , la variazione angolare e il momento angolare :

Se il momento esterno è applicato in modo che influenzi l’orientamento del giroscopio, il cambiamento nel momento angolare causerà una precessione, il cui angolo di spostamento è dato da:

dove è l’intervallo di tempo durante il quale viene applicato il momento esterno. Questo mostra come un giroscopio resista ai cambiamenti nel suo orientamento grazie alla conservazione del momento angolare, rispondendo in modo prevedibile quando viene sottoposto a momenti esterni.
In sintesi, la conservazione del momento angolare è il fondamento fisico che consente al giroscopio di mantenere la stabilità dell’orientamento e di rispondere in modo caratteristico a forze esterne, come nel fenomeno della precessione.
Tipologie e impieghi del giroscopio
Esistono tre principali tipologie di giroscopi: meccanico, ottico, a cuscinetto gas.
Giroscopio Meccanico
Il principio di funzionamento del giroscopio meccanico si basa sulla conservazione del momento angolare. Questo tipo di giroscopio è uno dei più noti e utilizzati. Per il suo funzionamento, il giroscopio meccanico richiede un cuscinetto a sfera per consentire la rotazione. Tuttavia, i giroscopi moderni hanno sostituito questi dispositivi più vecchi grazie alla loro maggiore silenziosità. I giroscopi meccanici sono impiegati nella guida veicoli aeronautici e nella navigazione di grandi aeromobili.
Giroscopio Ottico
Questi giroscopi non si basano sulla ruota rotante o sul cuscinetto a sfera. Inoltre, il loro principio di funzionamento non si fonda sulla conservazione del momento angolare. I giroscopi ottici utilizzano due bobine di fibre ottiche che ruotano in direzioni opposte. Grazie alla loro robustezza e all’assenza di parti mobili, i giroscopi ottici sono considerati affidabili e vengono utilizzati nei veicoli spaziali.
Giroscopio a cuscinetto gas
Questo tipo di giroscopio riduce l’attrito tra le parti mobili utilizzando un gas compresso per sostenere il rotore. La NASA ha utilizzato un giroscopio a cuscinetto gas nella costruzione del telescopio spaziale Hubble. I giroscopi a cuscinetto gas sono più precisi e silenziosi rispetto ad altre tipologie di giroscopi.
Rispetto a un sensore accelerometrico, i giroscopi presentano importanti differenza. La tabella seguente elenca le principali di queste differenze.
| Accelerometro | Giroscopio |
| L’accelerometro è utilizzato per misurare l’accelerazione non gravitazionale. | Il giroscopio è uno strumento che rileva l’orientamento di un corpo. |
| La macchina di Atwood, creata nel 1783 dallo scienziato inglese George Atwood, è stato il primo accelerometro. | Il fisico francese Jean-Bernard-Léon Foucault creò e chiamò il giroscopio per la prima volta nel XIX secolo. |
| È utilizzato per rilevare l’inclinazione rispetto alla direzione della gravità e per misurare il movimento lineare. | È utilizzato per misurare tutte le forme di rotazione, sebbene non sia efficace nel rilevare il movimento lineare. |
| Ha un rapporto segnale-rumore inferiore. | Ha un rapporto segnale-rumore superiore. |
| Non è efficace per misurare la velocità angolare. | È in grado di determinare la velocità angolare. |
| È impiegato per rilevare l’orientamento degli assi. | È utilizzato per rilevare l’orientamento angolare. |
I principali impieghi dei giroscopi sono elencati di seguito.
- Negli indicatori di rotta
I giroscopi, comunemente noti come giroscopi direzionali, sono utilizzati negli indicatori di rotta. Un indicatore di rotta è uno strumento di volo che i piloti usano per conoscere la direzione e la rotta del loro aereo. - Bussola
Mentre una bussola cerca il nord vero, un giroscopio direzionale potrebbe non farlo. Per ottenere ciò, rileva la rotazione dell’asse terrestre e cerca il nord geografico piuttosto che il nord magnetico. - Con accelerometri
I giroscopi sono utilizzati insieme agli accelerometri, impiegati per determinare l’accelerazione ottimale. È importante notare che la velocità di un oggetto può essere determinata misurando la sua accelerazione e integrandola nel tempo. - Elettronica di consumo
I progettisti hanno integrato i giroscopi nella tecnologia recente poiché essi aiutano nel calcolo dell’orientamento e della rotazione, fornendo stabilità nella navigazione o mantenendo una direzione di riferimento. Oltre a essere utilizzati in bussole, aviazione e dispositivi di puntamento per computer, i giroscopi trovano impiego crescente nell’elettronica di consumo come smartphone e smartwatch. - Nei giocattoli
I giroscopi sono utilizzati anche nei giocattoli. Esistono piccoli giroscopi che costituiscono eccellenti strumenti didattici per insegnare ai bambini il funzionamento dei giroscopi, oltre che in joystick per videogames. - Nelle biciclette
Un’alternativa valida alle rotelle di supporto sulle biciclette è rappresentata dai giroscopi con volano alimentati elettricamente, integrati nelle ruote per migliorare la stabilità. - Nelle navi da crociera
I giroscopi sono utilizzati nelle navi da crociera per stabilizzare apparecchiature sensibili al movimento, come i tavoli da biliardo auto-livellanti.



